Compositor OS – vector operation system
The file system of new Compositor OS uses the cycle spin value (angular velocity), which constitutes the media file length in milliseconds. This way the files could be categorized by their length and not by their content. While it is acceptable behavior for ethers and loop structures, many media formats may be out of scope for such categorization method. When you select the file to work with, the kernel regeneration state is changed, enabling other peers of the system to connect equally. It means that more regeneration comes from short files and longer files will gain the same amount of equally spaced connection points. You can work with it faster, setting higher omega speed. Kernel regeneration algorithm will perform playback and categorization. However, the system made specifically for real-time work to enable connectivity while you are listening to the material. The work with files can be done in mute mode also but there is no need to increase the iteration speed, because network scanning is made in a pace of the network map file deployment. Such network maps are tracks to the servers and standard techno music tracks serve exactly the same purpose as network loops, but instead of applying modulation in real-time, they just install it sequentially by the flags of drum percussion. The algorithm can be implemented to write tracks, initiating record in bpm of playback material. Setting the same track length, you may conduct a recording when changing bpm parameter. This way you can achieve a copy of recording you like.
The desktop system shouldn’t work faster than deployment of network map in real-time. This leads to speeds nearby 0.5 bpm. It makes real-time operations much easier. The next task after the sound driver is to make a network driver. This task includes decoupling constellations in favor of semi-free 3-axis model suitable for independent control of axis from the system multiplier value. Here is the challenge to decouple all mapped parameters from the multiplier in favor of more freedom and control over kernel parameters. However, the main transmission parameters couldn’t be decoupled from the transmission matrix. This leads me to the following solution: while the main kernel parameters are set and no longer need to be changed in any way, I don’t need to include kernel parameters in the main GUI design, because as the system is desktop, it doesn’t need lower-priority parameters such as window composition and transfer function selection. This parameters suit the goal of kernel protection against incoming network threats. The solution was to implement all needed methods to deny system invasions in kernel from other sources such as TCP over IP connections and other Ethernet tricks to connect to the carriers of the Compositor kernel. While the only carrier I can trust is all positive frequencies, the negative part was disqualified by the previous post solution of playing backwards. This way the negative frequencies traffic no longer can sit on the carrier.
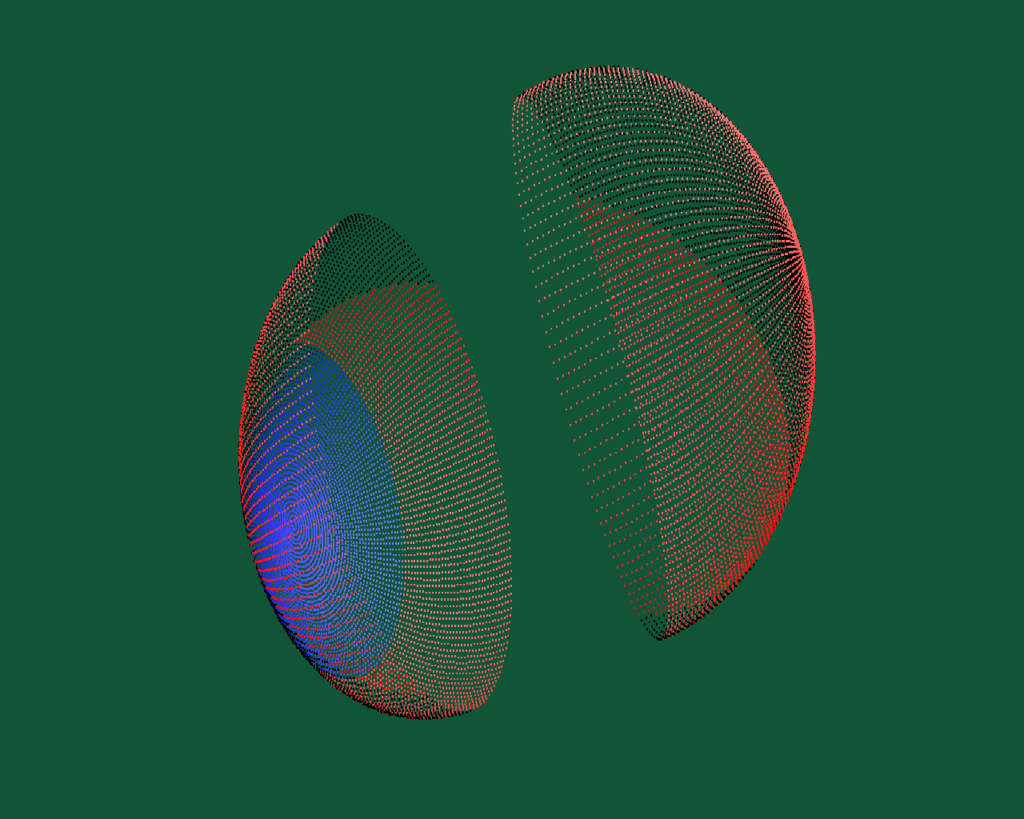
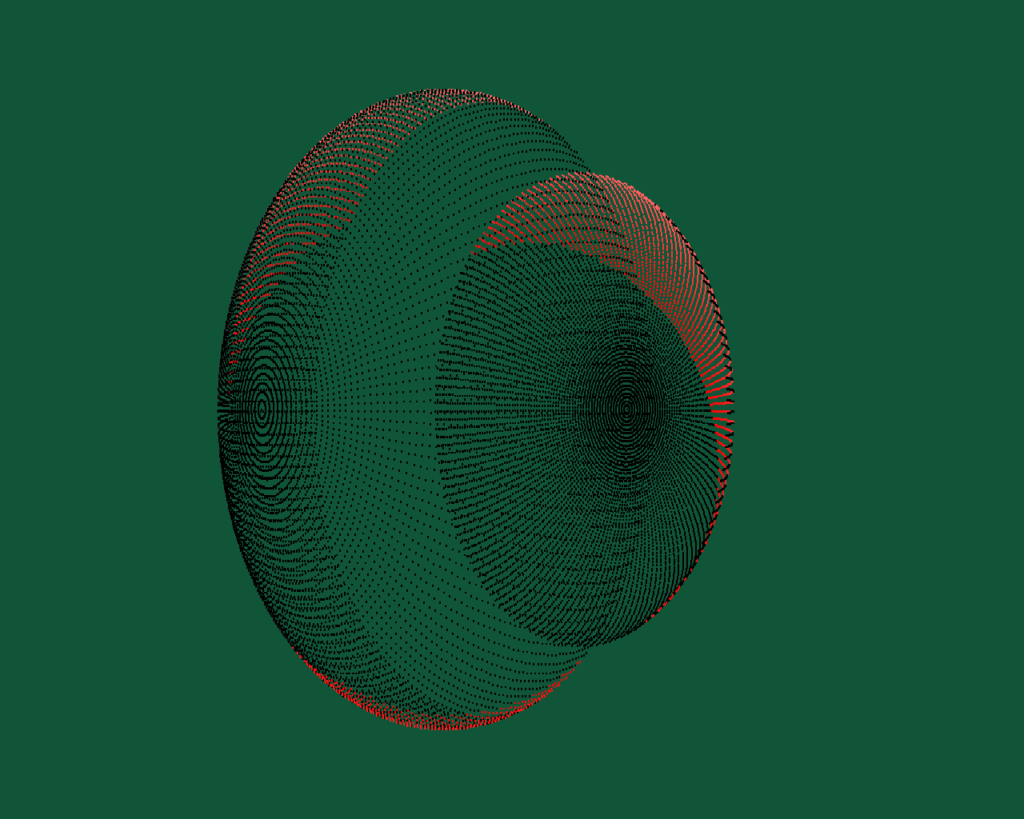
Manual input is now possible to the kernel. Currently I map it to the 0.5 to 1 in absolute values, but can also dispatch these values on any input system. I do not insist on complete freedom in vector scaling, because this values are empirical and constitute angles, which form the beats together with other angle values. However, as the question rises about complete three-dimensional freedom, the 3D OS or the vector operation system doesn’t need values beyond the scope of the scalars present from the constellation values. The pitch angle has two-phase values, they are selected to force the VLF waves to pass through the ionosphere. The first range covers the left hemisphere and the second range covers the right hemisphere. Together with roll and yaw angles it forms the position of two bell shaped structures visible at the above picture. Yaw has four positions, which cover mostly all values except the negative values beyond the minus 90 degrees. This brings me to the solution of changing the azimuth in the Compositor OS system. Changing vectors, you are waiting for the next automatic kernel rebuild and once the values set and rebuild process is done, kernel inherits the values from the angles selected. Choosing the vector state of FWOS gives a plethora of possibilities to the kernel communication state. You select only those values, pointing to the area in the sky, where the mirroring point to the destination land is present. Thus, rotating the mirroring point, you actively scan all the land under the mirroring angle on the connection dots present. Such connection dots could be seen on the matrix model above with the red color and blue color represents the mirroring point. When no blue color presents, mirroring no longer available for the applied signal. After broadcasting the signal driven by the Compositor OS driver onto main MaxMSP driver, the network maps deploy on the location of the mirroring circumference actively covering the land, which they are applied to. There are a number of ways to deploy Compositor maps on the virtual terrain using the spherical driver with quaternion. Mainly they are flushed in the selected tempo, either real-time for listening while flushing or faster than real-time for active system. Real-time flushing is also active but consumes lower resources as the speed of kernel regeneration is lower and there is no need to scrub through the file faster. The implementation of scrubbing methods should be done more consistently and may constitute different LFO for signal scanning. First, the scrub LFO should be taken from the beats waveform of passive AM modulation system, as it has no implementation beyond the scope of the kernel and should be easily implemented for kernel self-feeding. It definitely should be done in real-time to protect the visual driver from hanging. Second, you can use a number of volatile LFO functions to control the scrub point. Making this, you are sure to visualize what happens inside the kernel FM driver and this way you can more easily implement all other kernel parameters.
